事前準備
- PC:Windows
- ケーブル:USB Type-C
- ブラウザ:Google Chrome 推奨
- 復元ツールURL:https://miraplay.fun/tool/index.html
注意:
本ファームウェアは標準OSR(ESP32 30ピン基板・TempestMax原設計の配線方式)にのみ対応しています。
操作手順
- OSRデバイス と PC をUSB Type-Cで接続します。
- Chromeで書き込みツール(上記URL)を開きます。
- Baudrateは既定値 115200 のままでOKです。[Connect]をクリックするとシリアル接続ダイアログが表示されます。
- MiraBotが接続されているポート(例:COM8)を選択し、ダイアログの[Connect]を押します。

5. 接続に成功したら、Device Typeでお持ちの機種(SR6/OSR2+)を選び、[START]をクリック。
- 画面下部の Terminal Output にインストールログが流れます。
- 進捗が 100% になれば完了です。

6.[Disconnect]をクリックし、USBケーブルを取り外します。
動作確認(書き込み後のテスト)
MiraPlay AiO を起動し、アカウントにログインします。
- 初回利用時はデバイス一覧が空です。画面下の**「デバイスを追加」**をタップして追加画面へ進みます。
- デバイス(MiraBot)本体の電源を入れ、近くのデバイスを検索します。
- 検出されると 「利用可能なデバイス」 に表示されます。
- 機種名は MiraBot S6(SR6系)/MiraBot S2+(OSR2+系) と表示されます。
- 一覧から対象をタップして接続します。
3. マイ → 動作テスト を開きます。画面上のスライダーが各可動軸に対応しています。
4. 各スライダーを操作し、それぞれの方向が正常に動作することを確認してください。
5. 表示される軸数は機種により異なります:
- S6:6軸(ツイスト含む)
- S2+:4軸(ツイスト含む)

初期姿勢の確認(水平出し)
電源投入直後の初期位置で、左右のアームが同じ水平面になっているかを確認してください。
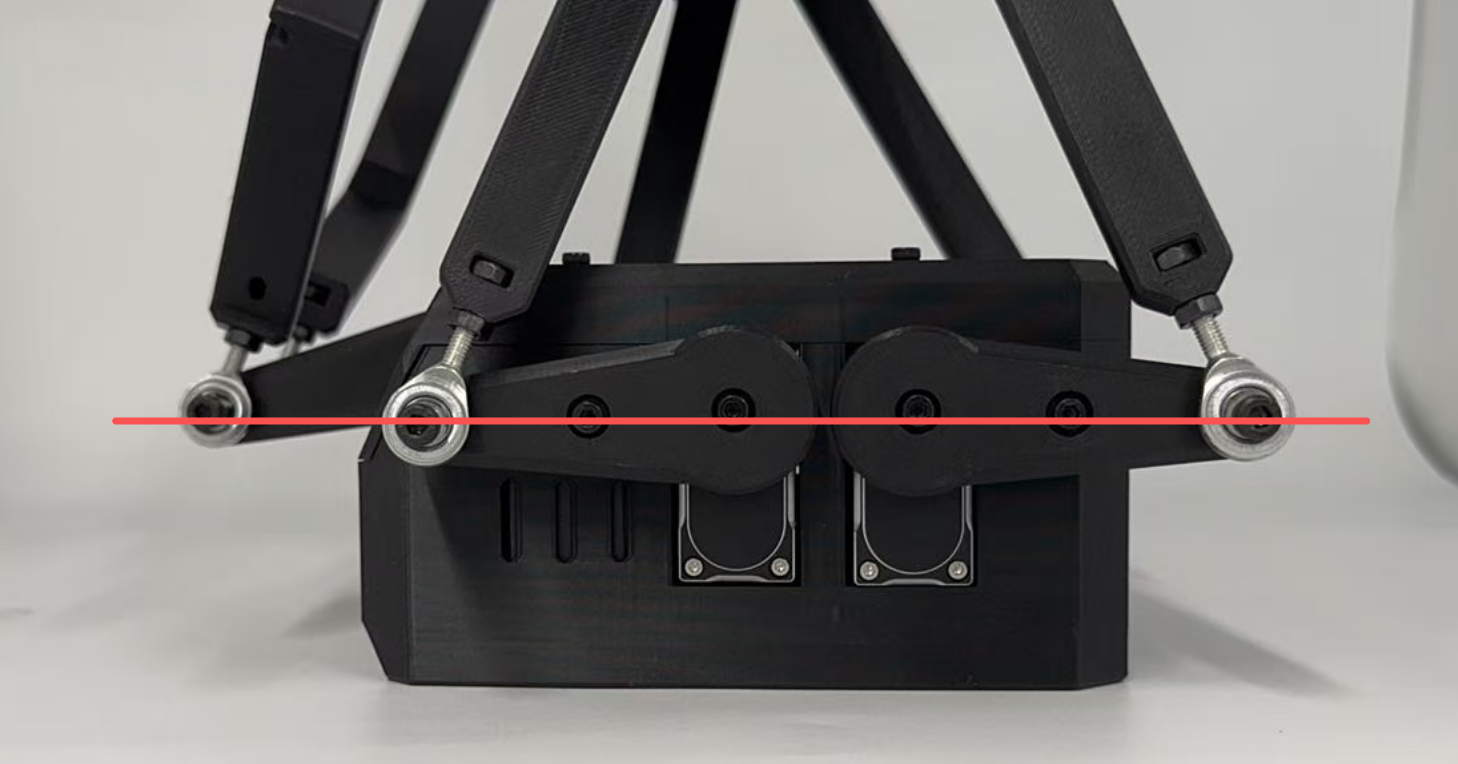
ずれている場合は、マイ → アーム初期設定 を開き、各軸の初期値(既定 1500)を基準に +/− で微調整してください。
+/− はそれぞれ時計回り/反時計回りの微調整です。

よくある注意点
復元が進まない場合:
- USBポート(COMポート)が正しく選択されているか確認
- 別のUSBポート/ケーブルに変更
- デバイスを再起動して再接続
進捗100%後にMiraPlay AiOのが使えない場合、Discordで状況をご報告ください。
Discord参加はこちら。